运动控制产品简介
第三方运动控制产品相关问答
完成条件
6. Beckhoff控制器带EtherCAT接口松下伺服,需要做什么配置?
松下伺服型号:MADHT1505BA3
1. 将该伺服相应的XML文件放到用来做配置的PC的C:\TwinCAT\Io\EtherCAT路径下,把硬件扫描上来。
2. 在伺服驱动器的‘Startup’下点右键添加0x6060 Modes of operation和0x3011 Number of output pulses per motor revolution这两项,如下图所示
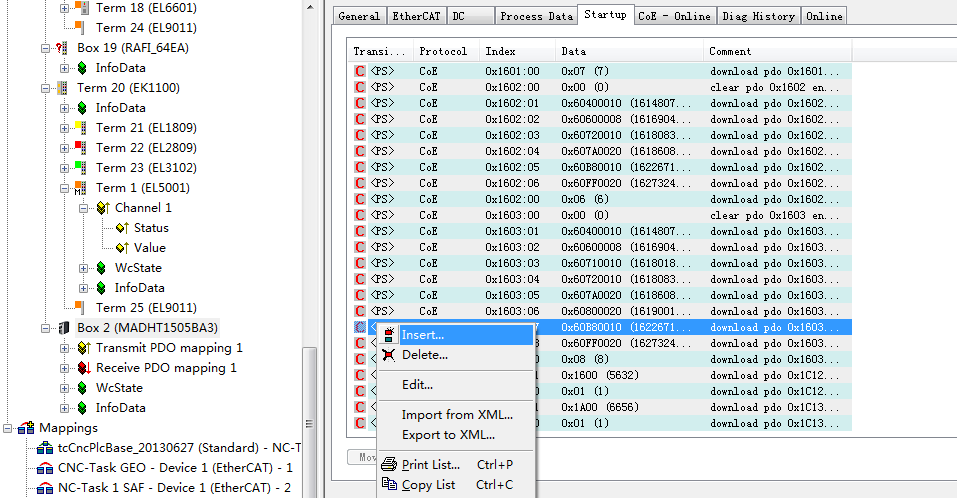
添加完成后,根据驱动器实际的工作模式,设置0x6060和0x3011的值。
比如:①若该松下伺服工作在位置模式,则将0x6060的值设置为8;若是速度模式,设置为9。②若该伺服所带的电机转一圈的脉冲数为1048576,则将0x3011设置为1048576。
3. 激活配置文件。激活完后,就可以正常使能和控制运动了。
魏正齐 2023.3.17 编辑