运动控制模块使用
模拟量输出控制伺服
完成課程所需要的條件
使用 TwinCAT NC 通过模拟量控制伺服驱动器或者变频器,需要配备的端子模块包括:
模拟量输出:比如+-10V 电压输出模块, 用于控制电机速度;
编码器输入:比如 5V 增量式编码器输入模块, 用于反馈电机位置;
数字量输入: 用于采集状态信号,比如 Ready, Error, 正负限位等;
数字量输出: 用于控制信号,比如 Enable、 Reset 等。
TwinCAT 配置步骤 如下
1. 添加一个轴
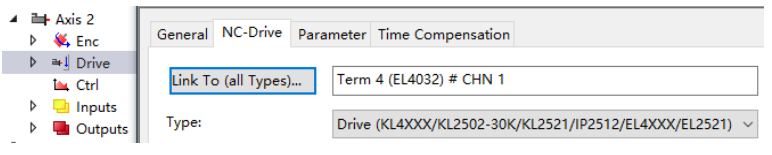
2. 将 Axis_Enc 和 Axis_Drive 分别链接到 EL 模块

3. 编码器 Scaling Factor 设置:
Scaling Factor: 根据伺服侧的设置,电机转动一圈,会发出多少个脉冲给 EL5101,以及机械传动参数决定的电机转动一圈前进多少距离。
Scaling Factor = 每圈距离 mm / 每圈脉冲数
4. 禁用误差检测,或者把 Lag Value 设置为足够大。
5. 设置参考速度 Reference Velocity,单位 mm/s。
Reference Velocity 就是模拟量输出最大值时,比如 EL4032 的最大值 10V, 对应的运动速度。例如:
假定驱动器设置为电压速度比 300 rpm/V, 即电压 10V 对应转速 3000rpm。
假定设备为丝杠传动,导程 10mm。
Reference Velocity = 电压速度比*最大输出电压/60*每圈距离= (300*10 rpm /60)*10 =
500mm/s
6.
设置死区补偿时间,为 NC SAF 周期的 3.5 或者 4 倍。
假定 NC Task SAF 周期为 2ms,死区补偿时间应为 0.007s 或者 0.008s。
如果不设置死区补偿时间, NC 输出给模块的 DataOut 值就会频繁波动,导致电机的振动和噪声大。
7. 激活配置,就可以在 NC 轴界面控制步进电机了。
由于是模拟量控制, NC 的使能信号并不能输出到伺服上的“Enable”端子, 所以需要配合 PLC 程序或者手动强制 KL2408 上的控制使能的 DO 点输出。
最後修改: 2019年 05月 26日(週日) 10:29