TwinCAT 3 使用入门
TwinCAT 3授权申请与激活
完成条件
4. 特殊的TwinCAT 3授权类型
4.2. 预激活Dongle EL6070-0033的配置步骤
一、配置控制器
首先我们需要连接控制器并与之添加ADS路由。这一部分我们不多做赘述,有需要可以参考TwinCAT 3入门教程。(模块排序:建议将EL6070放在控制器后,作为第一个EtherCAT从站)
将控制器切换到配置模式,并且右键I/O Devices->Scan,对IO进行扫描和添加。
扫到EtherCAT Device,将其添加上来。
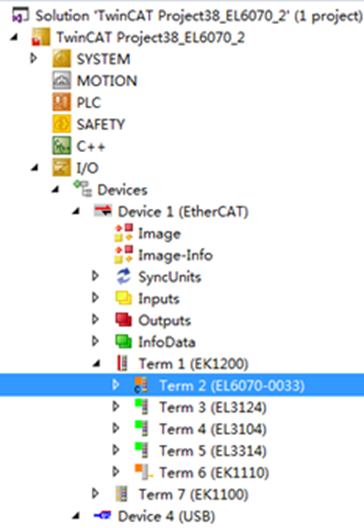
继续扫描模块,并且检查是否将EL6070模块扫描上来。
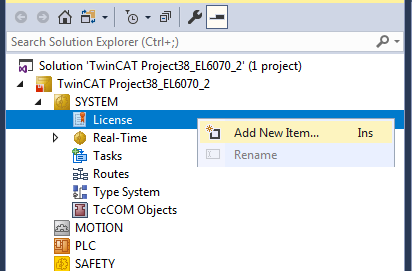
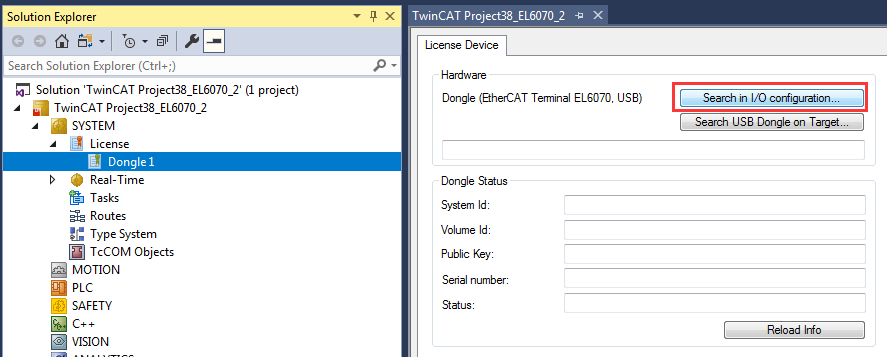
回到解决方案资源管理器,鼠标右键单击License,点击Add New Item,会添加成功一个“Dongle1”。
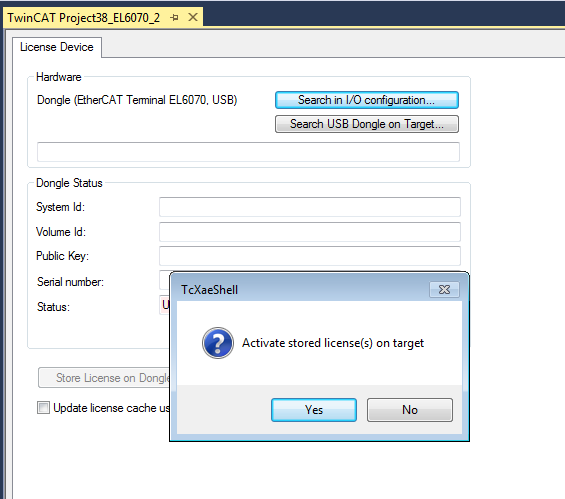
在Dongle1→License Device选项卡下面选择Search in I/O configuration…
(如果这里search in I/O configuration找不到模块的话,需要在IO里手动删除识别到的EL6070,然后再添加一下EL6070就可以使用了)
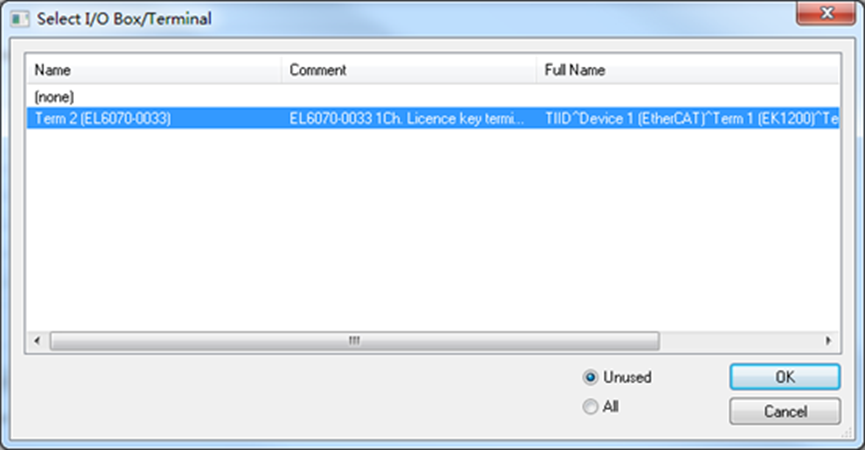
弹出的对话框选择扫描到的EL6070模块,点击OK。
提示是否将License存储到目标控制器,点击“是”
此时在消息框里,就会出现消息提示我们已经复制License重新切换TwinCAT状态就可以正常使用了。
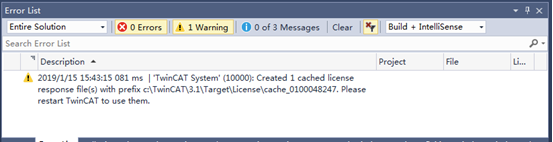
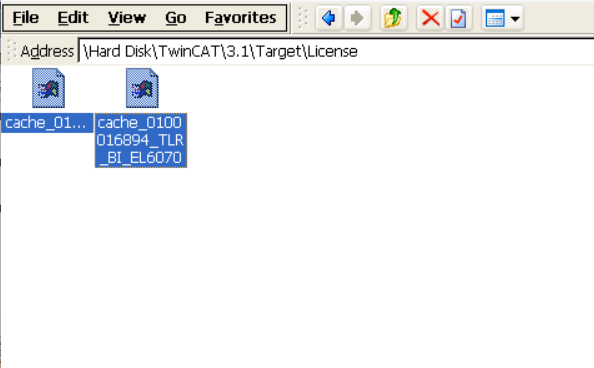
当前控制器C:/TwinCAT/3.1/Target/License文件夹内,已有永久版License文件。
然后我们可以点击Restart按钮 ,直接将TwinCAT3模式进行切换,这一步骤会将控制器内的永久授权正式激活。
,直接将TwinCAT3模式进行切换,这一步骤会将控制器内的永久授权正式激活。
之后我们可以根据需要对工程做好配置,写代码,配置轴参数等等。做好所有配置以后,激活配置并允许控制器切换到RunMode。
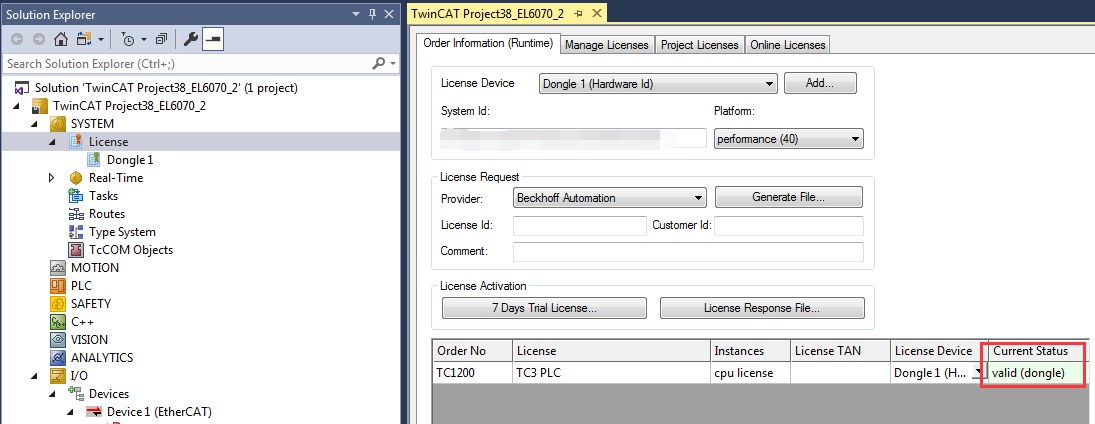
最后我们来观察一下License中的信息,显示我们所用到的TC1200是Valid(Dongle)