TwinCAT 3 使用入门
TwinCAT 3.1.4026 常见问答
完成条件
8. TwinCAT 3.1.4026使用Uermode Runtime本地激活运行项目程序的方法
注意事项:
①仅支持TwinCAT 3.1.4026版本软件,通过Usermode Runtime激活运行程序;
②在Usermode Runtime模式下,无法连接实际I/O进行配置,也无法配置实际的总线通讯。
- 安装TC170x | TwinCAT 3 Usermode Runtime

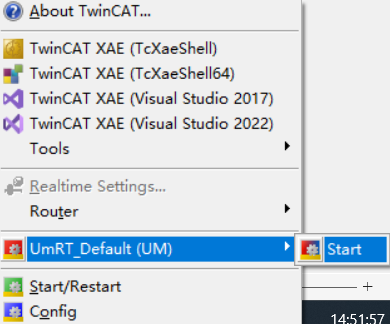
安装完毕后,可以在系统任务栏→TwinCAT图标→UmRT_Default(UM),点击Start
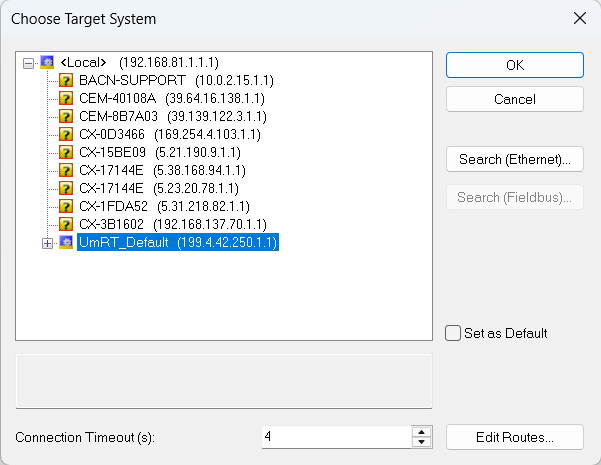
在TwinCAT 3软件中Choose Target到UmRT_Deafult(该Target会自动生成,无需手动添加路由)
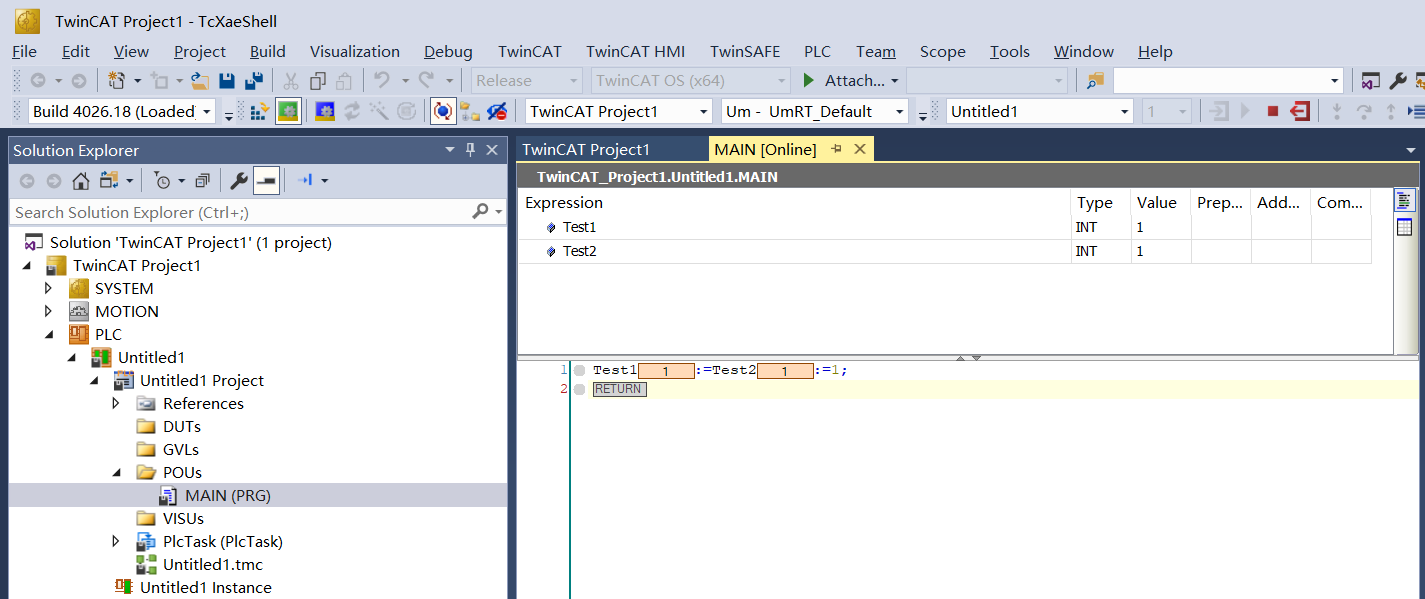
之后就能正常激活程序并运行了
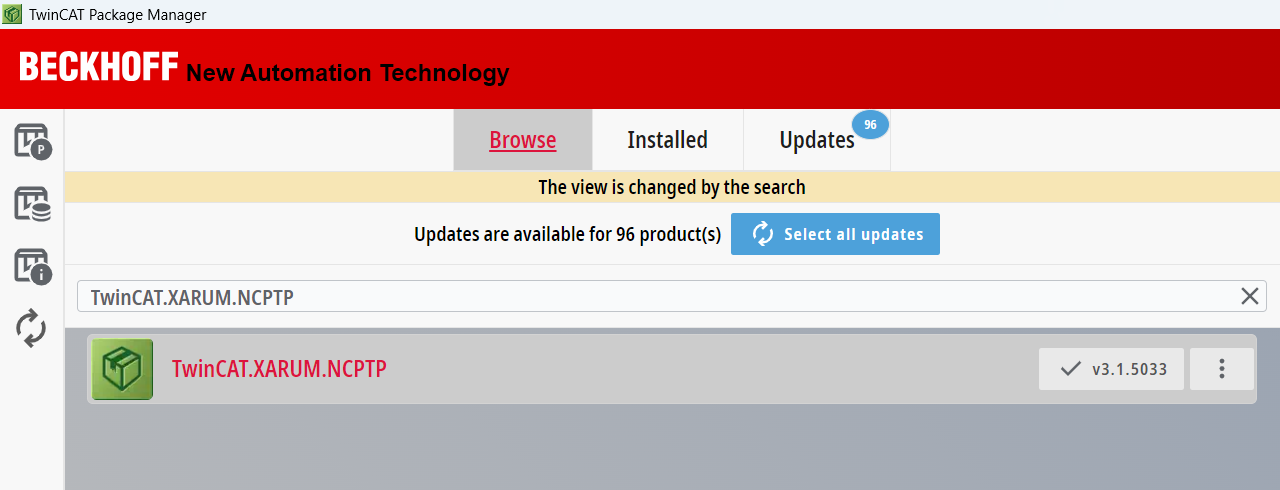
若还想仿真NC功能,就需要再安装TwinCAT.XARUM.NCPTP组件。先进入TwinCAT Package Manager的Packages浏览界面
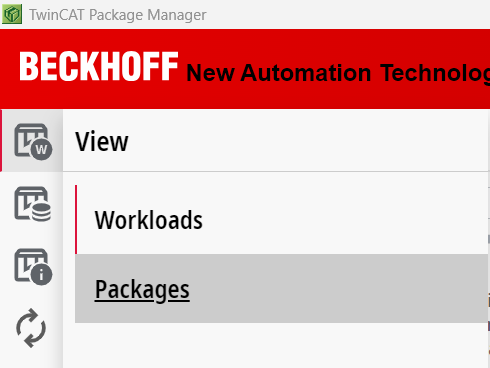
进入Browse选项卡,然后可以直接在输入框中填入TwinCAT.XARUM.NCPTP进行搜索,搜到之后直接安装即可
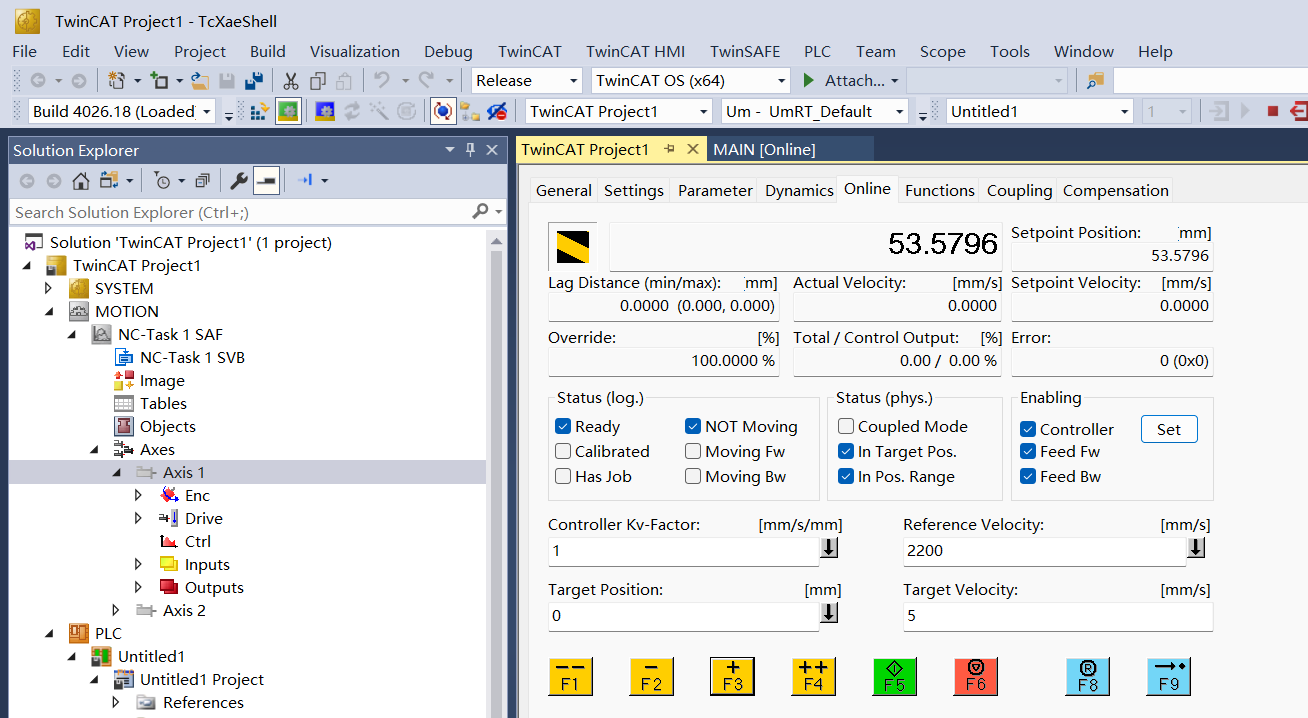
手动创建NC轴,并按照第2~4步的操作重新激活TwinCAT。之后就能调试虚轴了,包括使能、点动、耦合等功能都是支持的,也可以编写运动控制程序运行。
2025.10.17 汪继彬 编辑