TC3_Motion运动控制入门
TwinCAT 3运动控制常见问答
完成条件
6. Axis轴
6.15. 轴回参考点时(homing),碰到参考信号后仍然往硬件限位运动,不执行停止和反向?
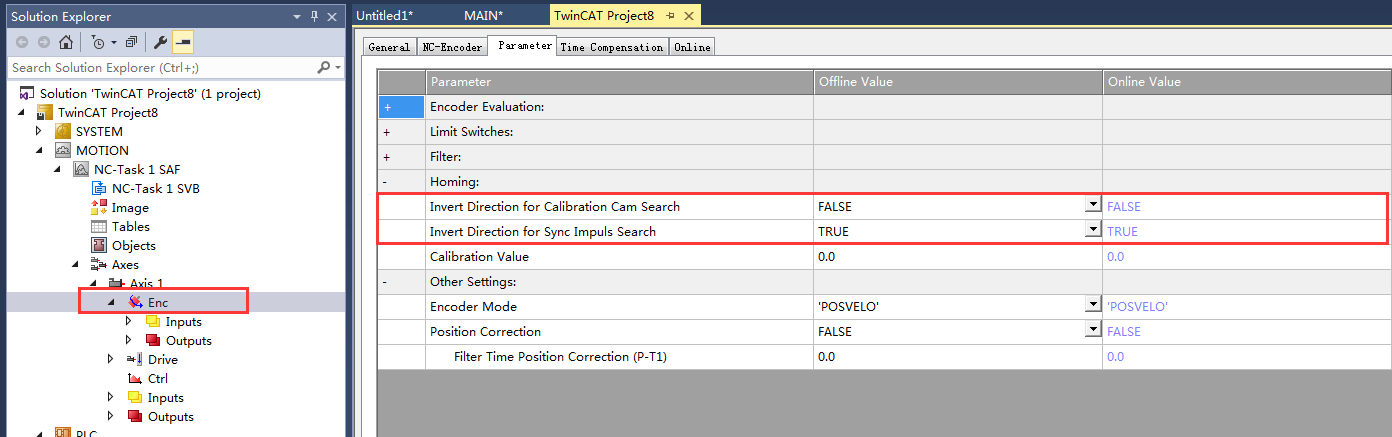
检查图中的寻参方向设置Invert Direction for Calibration Cam Search 和 Invert Direction for sync Impuls Search,如果两个同为FALSE或者同为TRUE的话,那么找到信号后可能会继续往前走,需设置成,一个为FALSE一个为TRUE。
魏正齐 2023.3.23 编辑