TC3_Motion运动控制入门
TwinCAT 3运动控制常见问答
完成条件
6. Axis轴
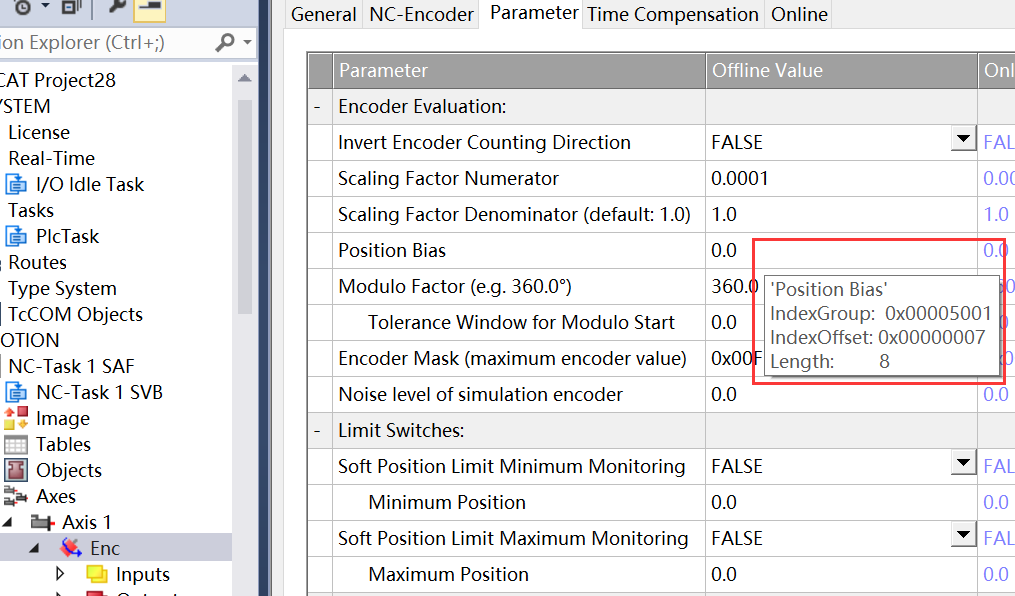
6.31. Position Bias怎么在TC3的程序设定绝对值编码器的。如何完成绝对位置和设备的标定。保证断电后依然保持位置。
配置设置bias值:首先将轴移动到设备的原点(如果用MC_Home执行后一定要再执行绝对定位移动到0),在Position Bias默认为0时,获取记录当前NC位置值中的数值(执行搜原点后必须重启设备才能获取),将数值取负放到Position Bias后激活,就可以完成绝对位置和设备的标定。效果为断电后,重启后显示的位置值与设置值进行补偿,这样原点依旧唯一有效。
举例:

轴停在原点位置时显示为500,那么position bias中需要设置为-500,设备重启后,如果轴在一个新的位置读到1000的话,它表示当前位置与原点的坐标关系时+1000,原理是它编码器反馈给NC的值时1500,因为原点的参考位进行了-500的补偿。
程序设置Position Bias:
使用指令MC_WriteParameterPersistent;该指令TC3独有的,特征为修改后保存至配置中,断电依旧有效。使用要注意在轴未使能时修改有效。如果是TC2希望依靠指令修改可以使用MC_WriteParameter,该指令写入值断电后会丢失,所以使用时需要每次上电重新触发。
MC_WriteParameterPersistent:
https://infosys.beckhoff.com/content/1033/tcplclib_tc2_mc2/2220090123.html?id=2619424149840361796
MC_ReadParameter:
https://infosys.beckhoff.com/content/1033/tcplclib_tc2_mc2/70063115.html?id=6037410941418876873

注意:使用时编码器必须设置为绝对值类型,否则MC_WriteParameterPersistent无法断电保持。

注意: 对于parameternumber这个参数还是可以直接通过MC_AxisParameter去数偏移量 https://infosys.beckhoff.com/content/1033/tcplclib_tc2_mc2/70158219.html?id=3906166945109889974
(这么做的原因是TC2和TC3都有这个参数,但是他们两个表有成员区别,导致使用结构体引脚对应的不一定是要的数据,所以自己数偏移量比如1000+42得出1042和链接一致才能保证一定正确)
魏正齐 2023.3.24 编辑