运动控制产品简介
AX5000常见问答
完成条件
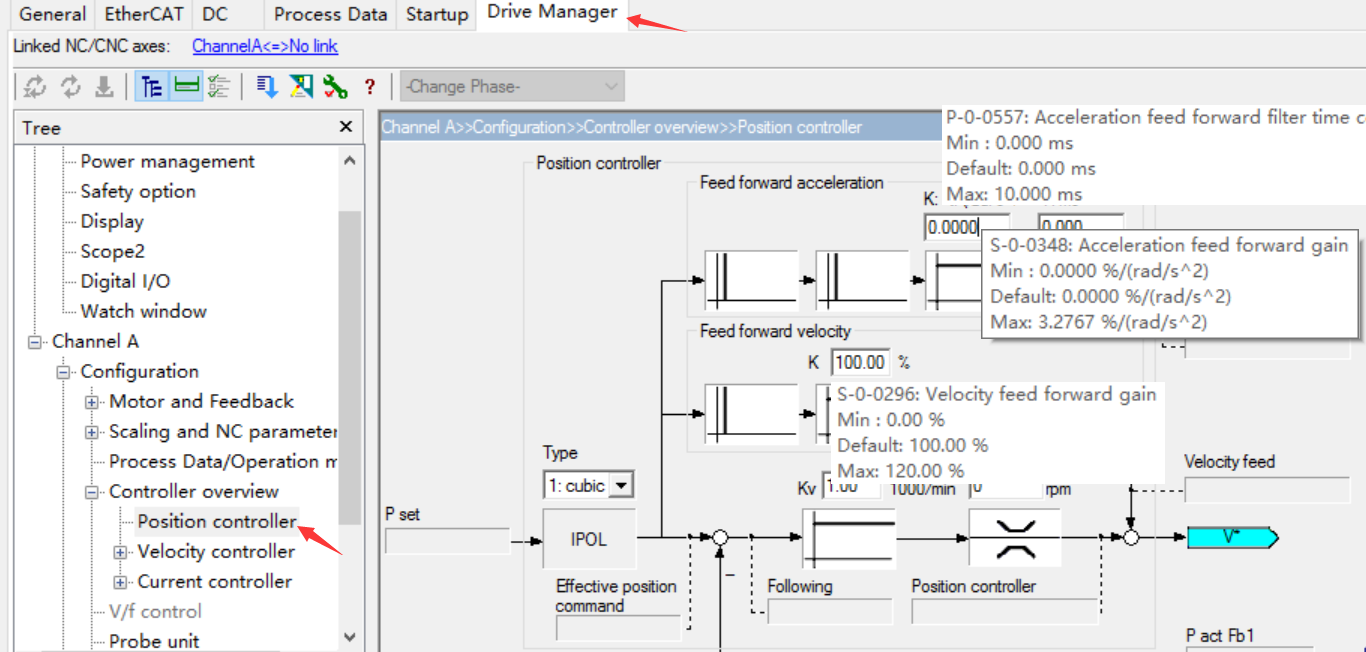
55. 驱动增加速度前馈,提高响应性(feed forward)
在PID调谐已经无限接近最佳响应的情况下,进一步提高响应需要在驱动器设置前馈,有2部分需要设置:加速度前馈和速度前馈。在调试过程中注意设置值在参数允许范围内,并且做好安全防护随时都可以停止设备。对于PID调谐请参考http://tr.beckhoff.com.cn/mod/resource/view.php?id=1317
AX5000的相关参数:
AX8000的相关参数:
https://infosys.beckhoff.com/content/1033/ax8xxx_object/11604799883.html?id=1311540963982057646
2019.8.26 罗晓晨 编辑